走行中の移動式充電車両が、複数のEVを同時に充電する移動充電サービス
世界的に深刻化する環境問題。各自動車メーカーでは、環境対策に向けて、ガソリン車・ディーゼル車に代わる電動自動車EVの開発を進めています。EVの最も重要要素はバッテリです。とりわけ、電費効率を高めるために、軽量・小型・短時間充電などが、EVバッテリには求められます。したがって、EVを普及させるためには、簡便な充電設備や充電インフラなどの拡充が、EV開発と同じくらいに重要になります。そのような背景で、今回注目したのは、走行中の充電車両が、複数のEVを同時に充電する移動充電サービスの発明です(US20210129697、LG Electronics)。
この発明では、空からの充電(ドローンによる充電)、陸からの充電(車両による充電)、有線による充電、無線による充電、様々は充電方式や形態が想定されています。
空からの充電(ドローンによる充電)
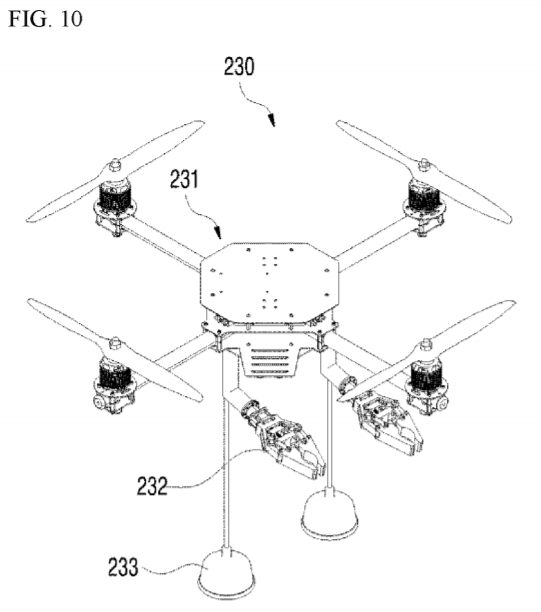
Fig.10はドローンを利用した充電支援モジュールです。
オペレーティング部(232)は人間の手のような形状をしており、対象物を掴んだりすることができます。
固定/解放部(233)は、互いに離間しながら、本体(231)の底面に設置されており、人間の足のような役割をします。
固定/解放部は、充電支援モジュールが移動式充電車両、または、充電要求車両の上部に着陸できるようになっています。
有線/無線充電
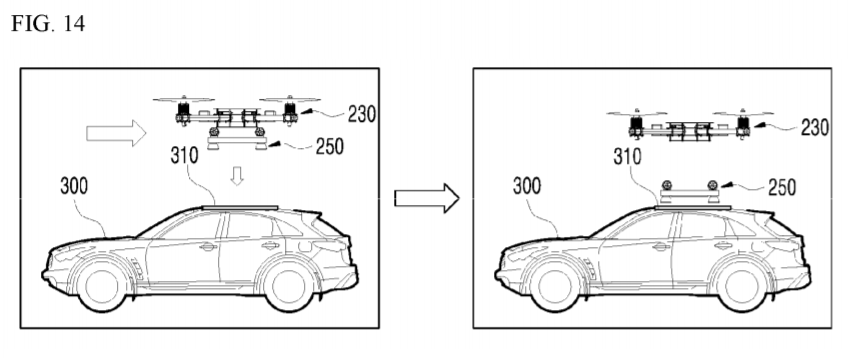
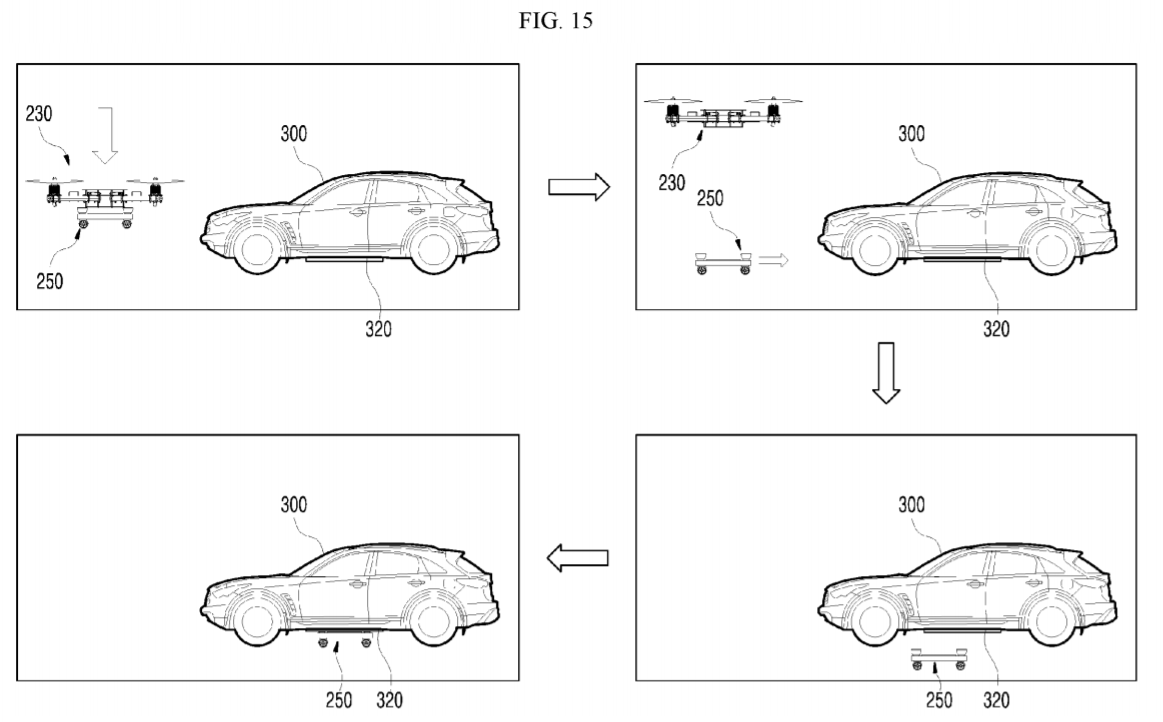
充電支援モジュールには、無線充電部(250)、有線充電部(260)を異なる位置に移動させることができます。無線充電部は、車両の上部からも、車両の底部からも、充電を実行することができます(Fig.14、15)。
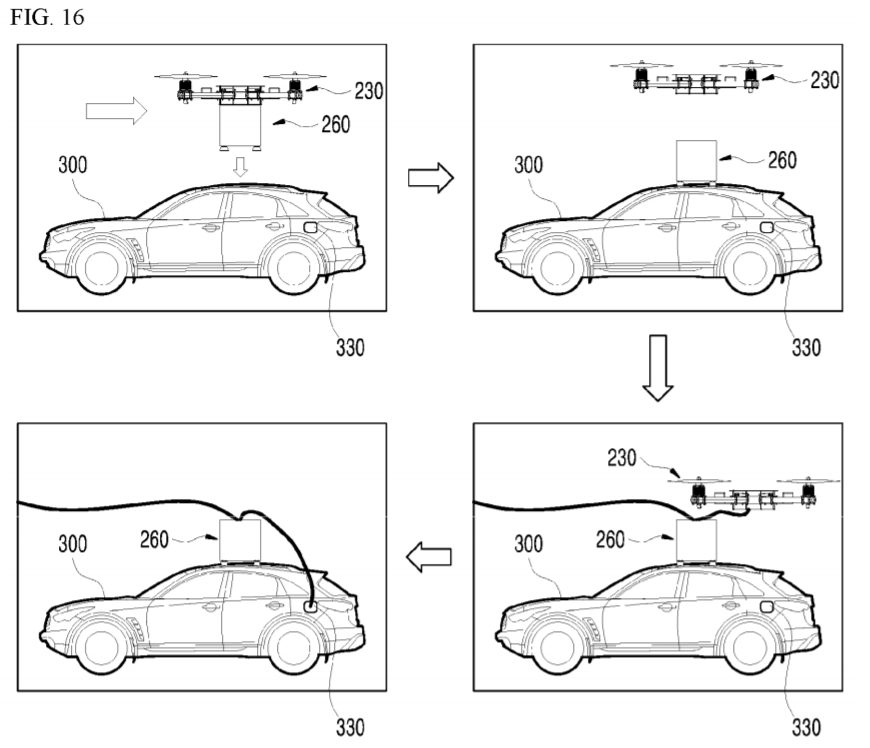
有線充電部は、移動式充電車両の有線充電部(260)の入力端子に接続し、出力端子の電源ラインを充電要求車両(300)の充電ポート(330)に接続します(Fig.16)。
陸からの充電(移動式充電車両による充電)
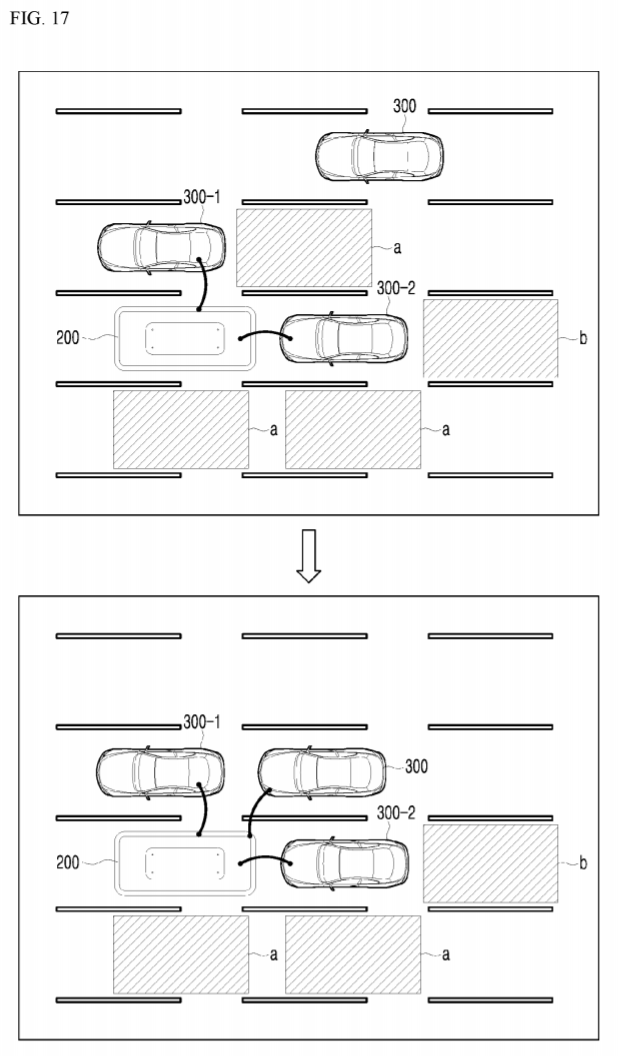
Fig.17は陸からの充電(移動式充電車両による充電)です。
移動式充電車両(200)は、充電要求車両(300)からの充電要求の受信に応答して、充電を行うことができます。
充電可能エリアa、bは、有線充電接続が直ちに利用可能な移動式充電車両(200)の近くのエリアとして分類することができます。
すなわち、充電可能エリアの位置情報を受信した後、充電要求車両(300)、充電可能エリアに移動することができます。
充電要求車両は、他の車両がいる充電可能エリア以外の充電可能エリアに入ることができます。
Fig.17では、充電要求車両(300-1)(300-2)の2台が充電されています。
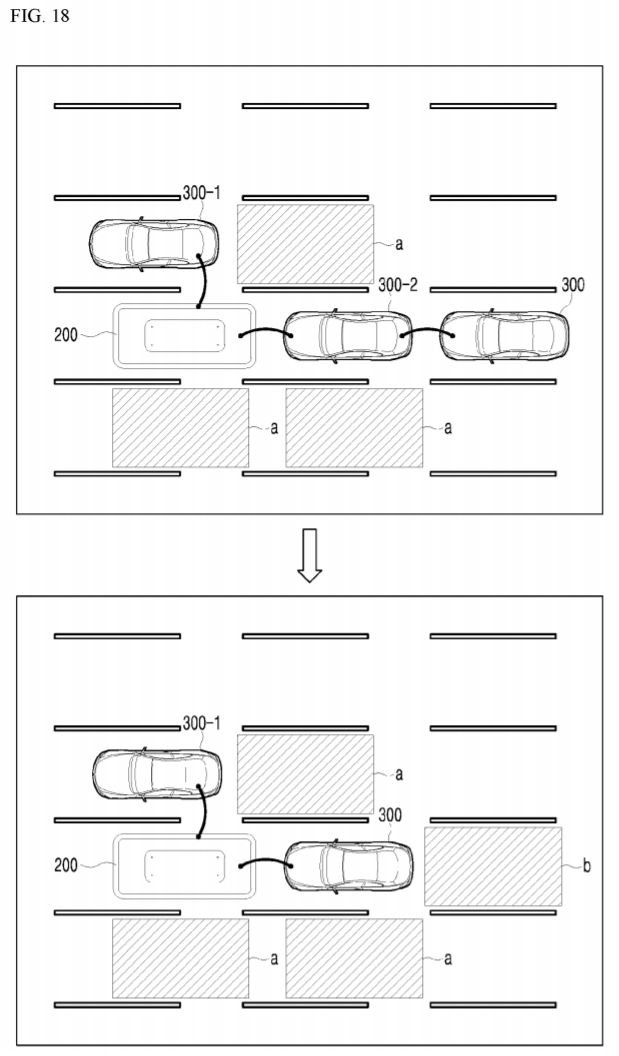
Fig.18は車両間接続方法を示します。
充電要求車両(300)が充電可能エリアa、bに入ったけれども、最も近いエリアaに入ることができない場合、充電コントローラは、充電支援モジュール(230)を使用して電源ラインを接続することができます。
Fig.18では、他の車両の出力端子(300-2)が充電要求車両(300)の入力端子に充電され、充電を実行します。
現代社会では、電気自動車EVに代表されるように、バッテリ駆動による機械(ロボット)はますます身近な存在になってきました。ロボットの役割は、従来の産業用ロボットが担っていた「人の労働力の代替」から、人間の能力を拡張する「無人システム」や「人との共生」に広がりつつあります。なかでも、限られた場所や環境(工場)から出て、現実環境で働くロボット「フィールドロボット」が期待されています。フィールドロボットは、農作業、インフラ保守・点検、建設現場、災害対応、物流配送、ドローンなど、多岐にわたる活躍が期待されています。
フィールドロボットの動力源はバッテリであるため、バッテリの残量管理や劣化予測など、遠隔操作機械であるフィールドロボットならではの電力管理の特徴や課題があるに違いありません。ネオテクノロジーでは、特許情報から、フィールドロボットと電力供給に関する様々な取り組みを俯瞰した、フィールドロボットの電力供給システムに関するダイナミックマップを発刊しました。ぜひ、お役立てください。