ファイナルマイル配送のための無人配送センター
ファイナルマイル(ラストワンマイル)を解決するための無人物流センターに関する発明です(US20190095862A1、AUTOBOTX, LLC)。
ネット通販の急拡大、それに伴う再配達の増加により、宅配業界は「ラストワンマイル問題」に直面し、その解決のためにテクノロジーを投入する挑戦が始まっています。近年では、ヤマト運輸とDeNAの共同実用実験「ロボネコヤマト」が記憶に新しいですが、この発明は、物流センターと配送プロセスを改革しようとするものです。
顧客がファイナルマイル配送を決める
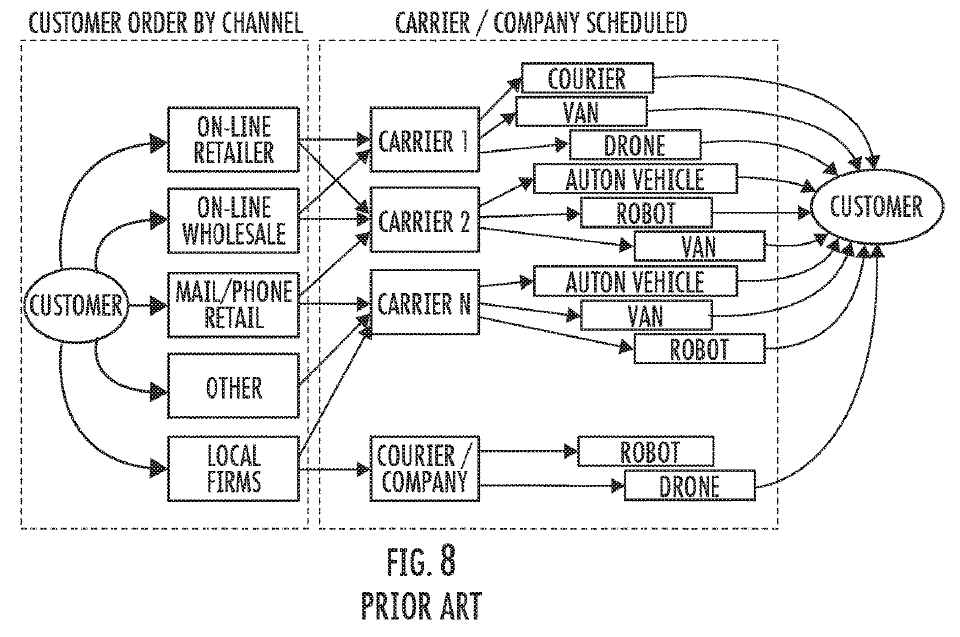
Fig.8は従来の配送プロセスです。さまざまな小売業者は顧客からの膨大な注文を受け付けます。各小売業者は配送業者と個別の配送契約を結び、顧客注文の配送を委託します。したがって、配送業者は複数の小売業者からの配送を請負うことになります。そして、いったん配送業者に委託されると、配送方法が固定されるため、顧客は商品が到着するまでその配送方法に従わなくてはなりません。発注から納品までの間に顧客のスケジュールやニーズが変わる場合があったとしても、従来の配送プロセスでは対応することができません。
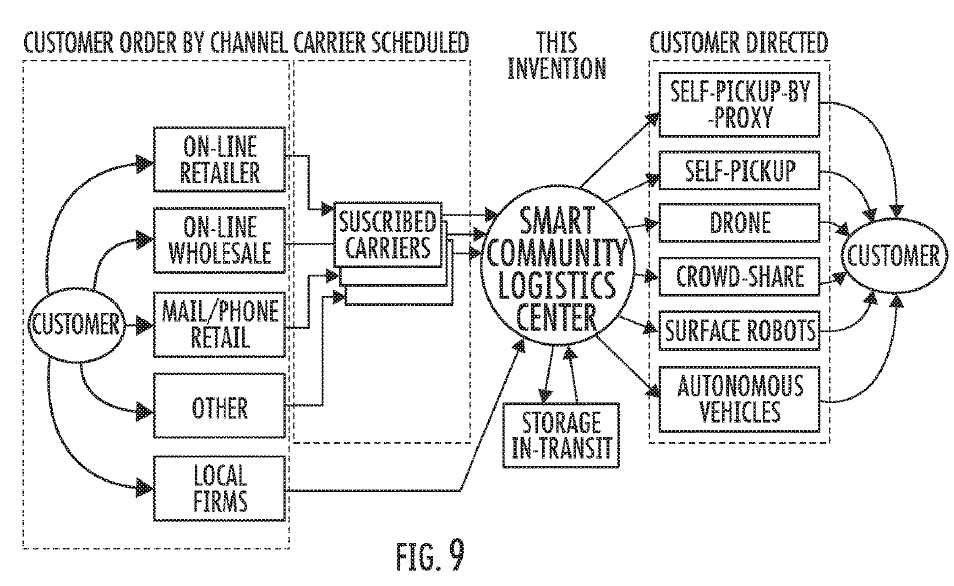
Fig.9は本発明の配送プロセスを示します。中央の「スマートコミュニティ・ロジスティックスセンター(SLC)」が荷物情報を管理します。配送業者は指定されたSLCに荷物を配送し、顧客は(配送業者にとらわれずに)電子配送情報を受け取り、好みの配送方法、配送時期を指定することができます。無人物流センターは、人間の介入なしに、荷物の積み込み、積み降ろしを可能にする自律型車両や、荷物情報の管理を行います。
荷物の受け入れ
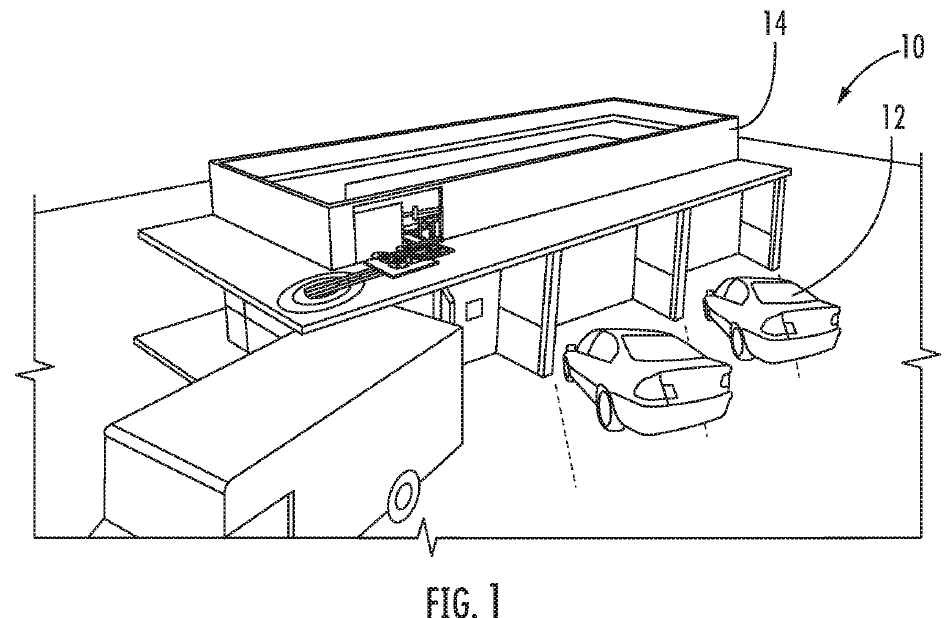
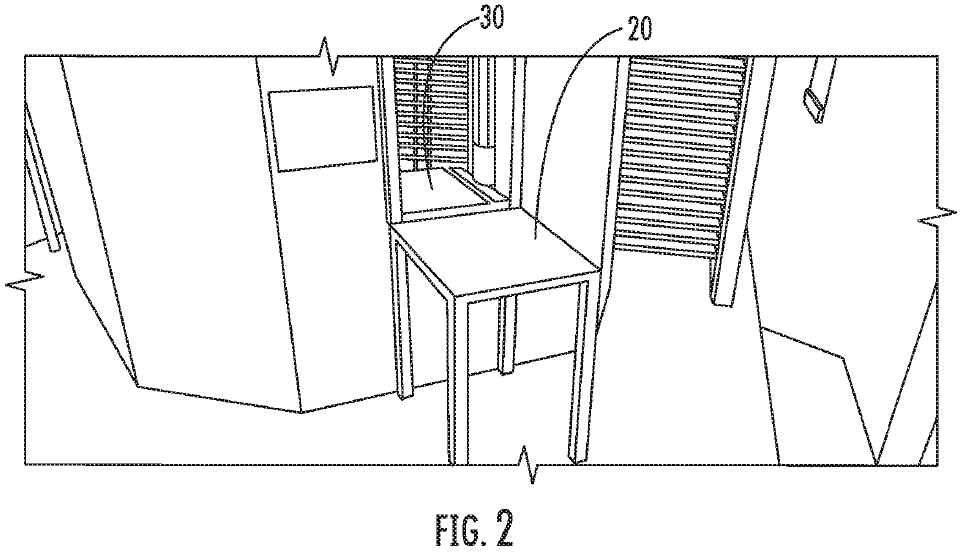
SLCにアクセスを許可された配送業者は、SLCへの荷物の受け入れ手続きを行います。配達車両は保管エリアに入ることはできず、荷卸しエリアで荷物の受け渡しを行います(Fig.1)。配送車両の運転手は積荷パッケージを降ろし、保管エリアとの受け渡しを行う誘導エリア20、金属製の誘導トレイ30の上に荷物を置きます(FIg.2)。保管エリア内のロボットが誘導トレイから荷物を取り出すと、カメラと重量計システムが荷物のすべての側面の画像を取得して荷物の重量を測定します。誘導機はこれらの画像を使用して荷物の寸法(長さ、幅、高さ)を測定し、識別用のバーコード情報を作成します。この情報はクラウドベースのシステムに送信され、注文情報と荷物情報が照合し、受領記録を作成します。
荷物の配送
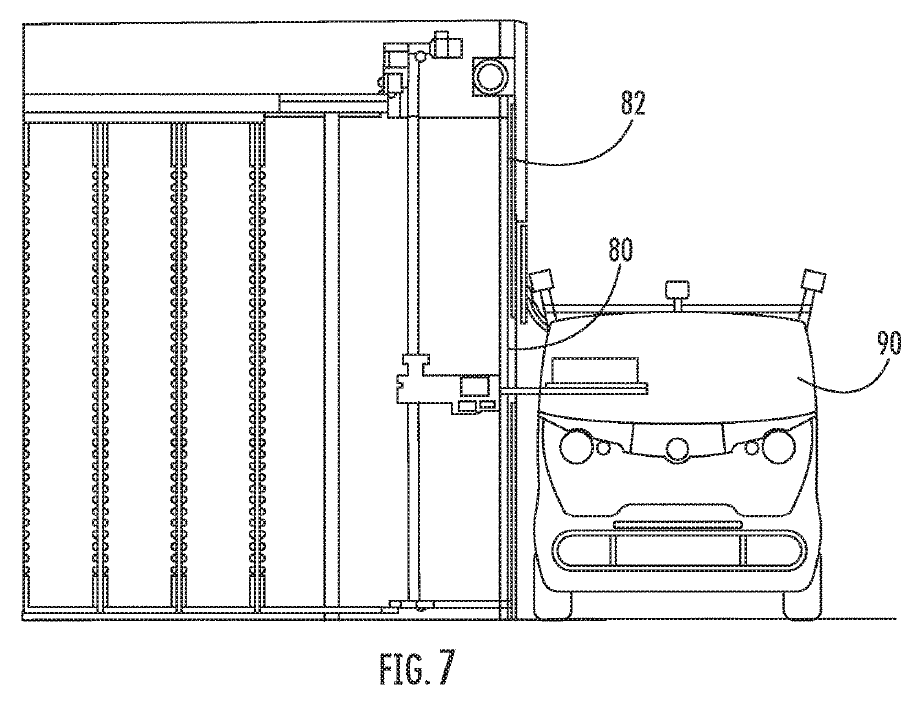
積載エリアを介して荷物が配送されます。積載エリアでは、特定区画の積載を行う開口部であるロールアップドア82を通じて、ロボットが無人自律車両90に荷物を積み込みます(Fig.7)。無人自律車両の貨物ドアの寸法は、物流センターの積載エリアと実質的に同一平面に収まるように設計されています。したがって、許可されていないユーザや他の個人は、貨物ドアまたは物流センターのどちらにも入ることができないようになっています。
また、顧客はセルフピックアップをすることもできます。顧客が支払キオスクで料金支払いを行うと、ロボットが荷物を保管エリアから支払いエリアに移動させ、顧客は荷物を取り出すことができます。
既存概念とは異なる視点
これまでのラストワンマイル対策は、配送車両を無人にしたり、宅配ロッカーを設けたり、従来の配送プロセスはそのままで課題を解決しようとするものが多いように思われます。しかし、従来の仕組みが限界にきている場合、既存概念とは異なる視点で問題解決を考えることも大事なことかも知れません。
この発明では、ロボットが荷物を誘導エリアから保管エリアへ、保管エリアと支払いエリアとの間、支払いエリアから誘導エリアよび保管エリアへ、保管エリアから誘導エリアへ移動させることで、無人配送センターを実現しようとするものです。根本的に従来の発想とは異なります。実際に実現させるためには、関連業界への働きかけや、ユーザを巻き込んだ実証実験が必要になり、一筋縄ではいかないかもしれません。しかし、このアイディアを実現するためのテクノロジーは全て揃っています。大事なことは、社会の変化に伴う問題を捉え、問題の解決策を本質的に考えることではないでしょうか。