画像から、間引く花を特定し、自動摘出する
視覚システムを使用して、植物で生育する花や花序を認識し、その位置を特定する、自己誘導型の花摘出装置の発明です(US20180263188A1、Carnegie-Mellon University)。
苗の手入れは、人手で行う労働集約型作業
大規模な農場では、種子から野菜の栽培を行うのではなく、育成した苗を移植することが多い。苗の育成においては、農場での移植に適した苗を育てるために、受粉される前に花を取り除くことによって、根や葉の発育を促しています。果物がある場合は、取り除かれます。花や果実の除去は、労働者が手作業で行う労働集約的作業です。したがって、苗から花やその他の望ましくない部分を除去するための装置の開発が望まれています。
画像から摘出すべき花を特定する
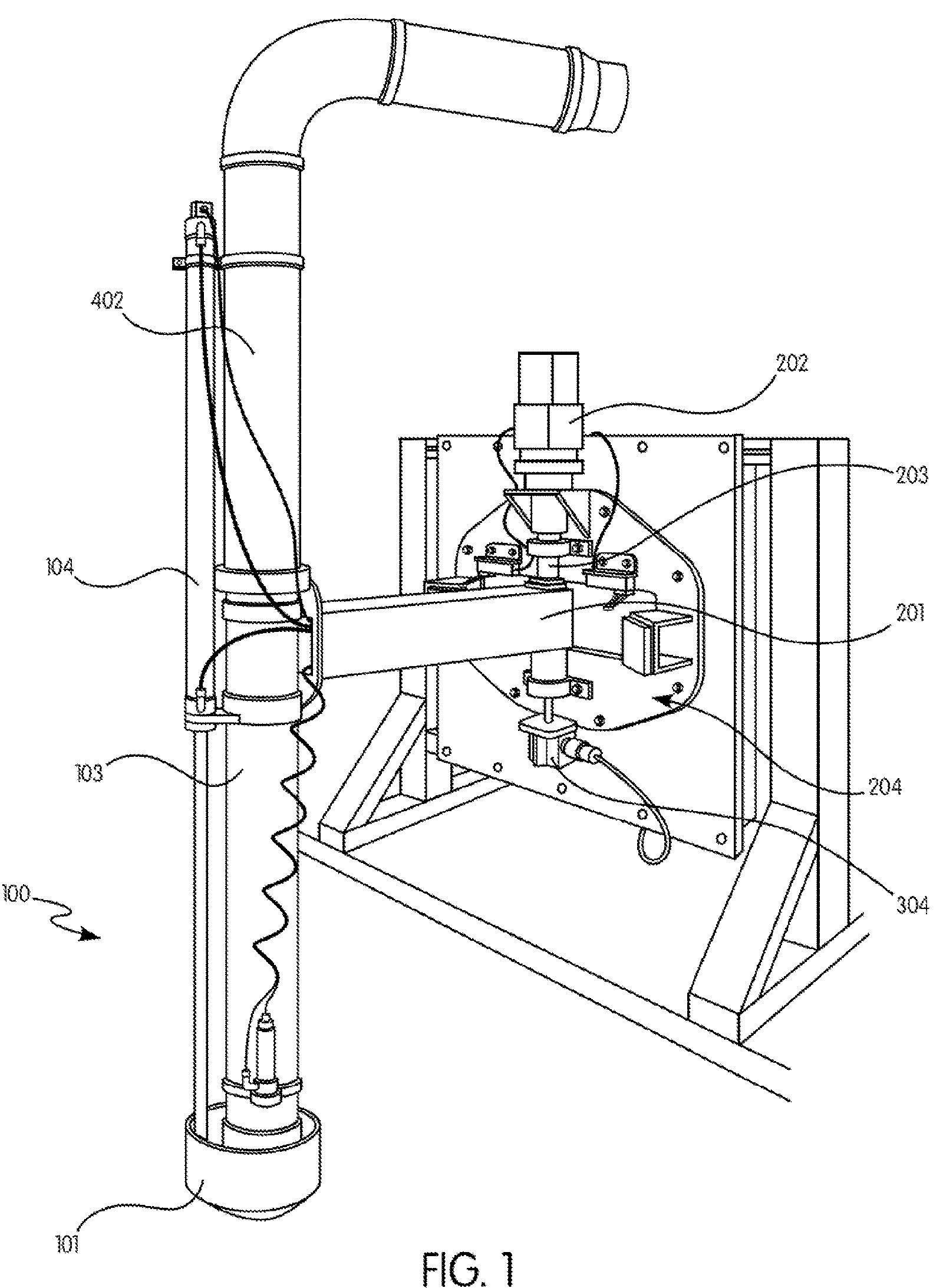
この発明は、植物から花等を切除するための装置です。可動アーム201と、可動アームの端部に取り付けられたピッカー100と、ピッカーの端部に配置されたカッター101と、花や果物を識別するビジョンシステム301で構成されています。可動アームはピッカーを水平面内で移動させ、カッターは垂直方向に移動します。所定の位置に来ると、カッターのブレードが作動し、花や果物が取り除かれます。
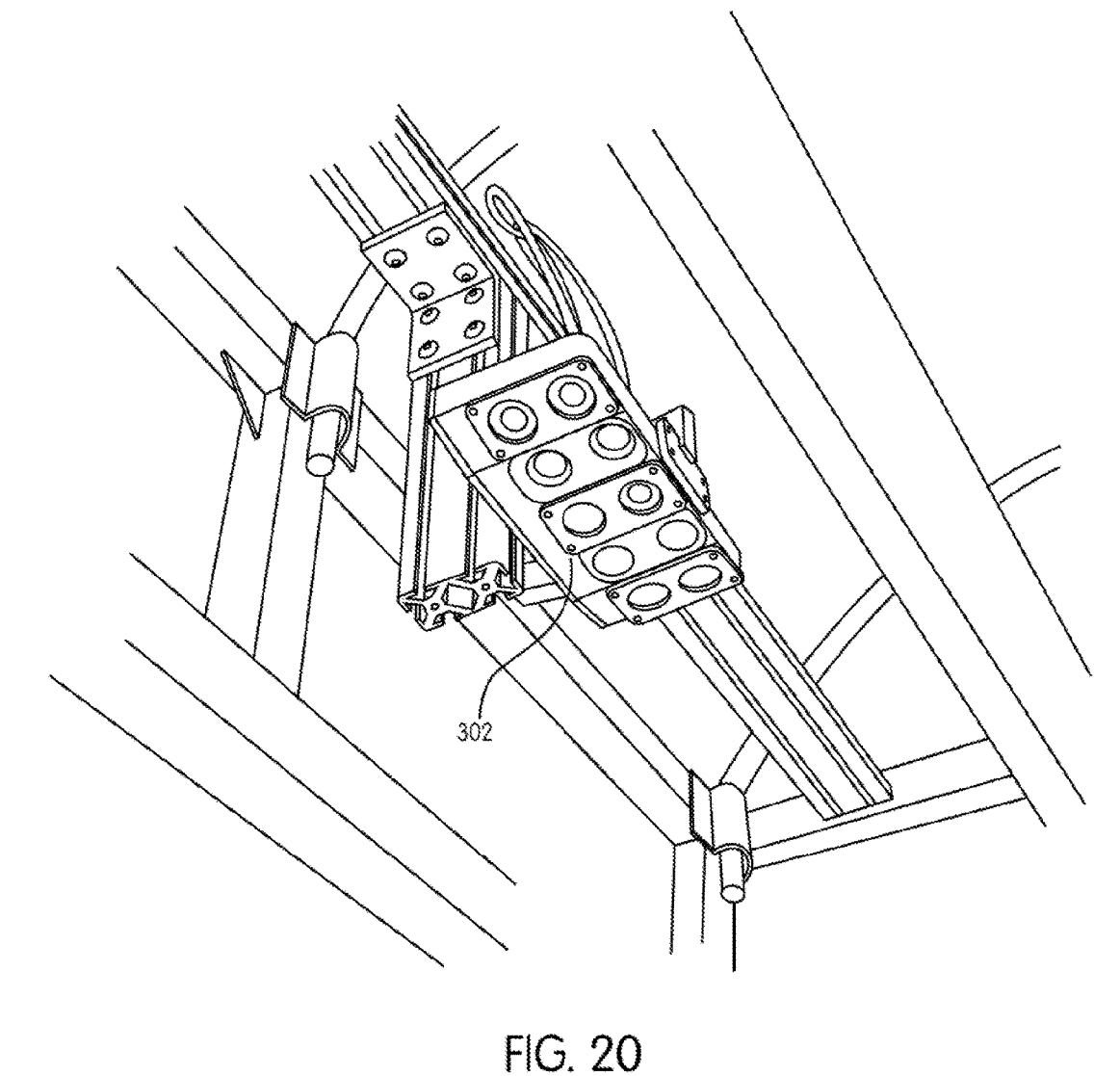
ビジョンシステム301は、画像キャプチャ装置302とマシンビジョンモジュール303とを備えています。Fig.20では、画像キャプチャ装置は、植物の外観および深度の両方の撮像された三次元画像を生成し、ビデオ形式または一連の静止画像として画像データを提供することができます。または、複数のカメラを備え、画像データを組み合わせてステレオ画像データを提供することも可能です。ピッカー100の延長部103を制御するためには、ステレオまたは3Dイメージングが必要です。植物の高さが推定される場合、2次元カメラを使用することができます。画像データを取得した後、マシンビジョンモジュール303データを処理して、画像内に花を配置します。
花の段階から、成熟した果物を推定する
花序または花は、植物とは異なる色の場合があり、マシンビジョンモジュールは、カラーフィルタリング技術を使用して花を容易に識別することができます。しかし、マシンビジョンモジュールは、除去すべき植物の一部に関連するピクセルから背景ピクセルを識別するために、色弁別、強度弁別、形状弁別、またはテクスチャ弁別を使用します。これによって、マシンビジョンモジュールは、花の段階から成熟した果実を識別することができます。イチゴの未成熟果実は葉と同じ色をしているため、果実の位置を特定するためには、色の識別以外の手法を使用します。花序に関連する果実を含む花序全体を除去するか、または場合によっては、単離された果実を除去します。色パターン、ピクセル強度パターン、明度、明るさ、色相、または反射率などのピクセルパターンまたは属性も、識別目的で使用することができます。さらに、可視スペクトル以外で色情報を提供する画像捕捉装置を使用することもできます。例えば、赤外線カメラは、イチゴの植物の花を検出するときに有用です。