ロボットが対話によって自発的行動を促し、徘徊を防ぐ
長寿命社会を迎え、高齢者の徘徊が問題になっています。ロボットが自然な対話を投げかけることで、認知症者等が自発的に行動して徘徊を防ぐ発明です(特開2018-005308、パナソニックIPマネジメント)。
長寿命社会を迎え、高齢者の徘徊が問題になっています。徘徊行動に対する対策としては、拘束や閉じ込めなどによって物理的に徘徊を防止する方法と、徘徊者の居場所を検出する手段によって徘徊者を発見し、徘徊行動が発生するたびに介護者が徘徊者を捜索して発見し連れ戻す方法の、大きく二つの方法が行われています。しかし、前者には、拘束や閉じ込めに対して人権的な問題があり、後者には、広範囲な許容エリアに対して人の出入りをコントロールするための設備やシステムに大きなコストがかかり、介護者が徘徊者を連れ戻す負担の解決にはなりません。
そこで、徘徊を検知した後に、介護者が介入するのではなく、「○○さん、夜遅いから寝ましょうね」などの音声報知をすることで徘徊者に注意を促し、徘徊を抑制する方法が考えられています。しかし、音声報知装置からは予め用意された音声しか報知できず、報知内容に従わない徘徊者に対しては効果がありませんでした。
短期記憶障害を利用して徘徊意図を忘れさせる
徘徊行動を起こしやすい認知症者は短期記憶障害を伴っていることが多く、認知症のスクリーニングテストでも、短期記憶を確認する設問が含まれています。この発明は、認知症者の短期記憶障害を利用して、徘徊者に初期の徘徊意図を忘れさせるような対話を投げかけることで、徘徊者を安全に所定の場所に誘導させる発明です。
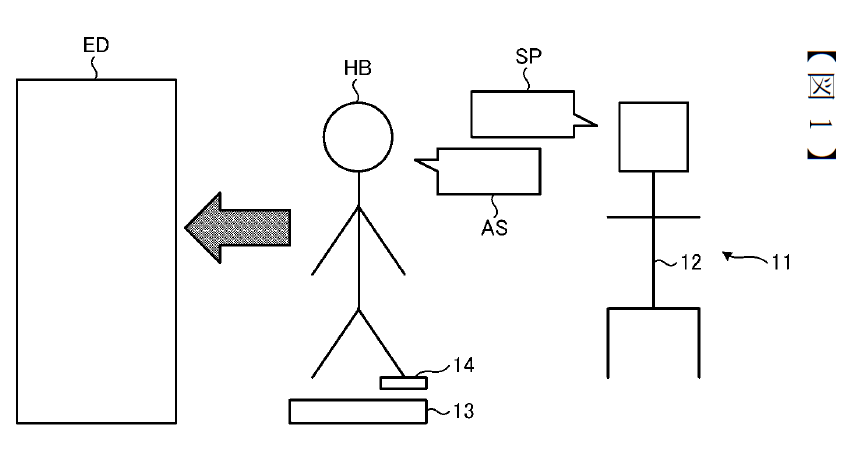
図1は徘徊抑制システムの全体構成を示しています。人物HBには行動通知装置14が装着され、介護施設や病院、自宅等の建物の出口付近等の所定の位置に設置された徘徊検出器13が、人物HBの徘徊行動を検知します。徘徊抑制装置12はユーザーインターフェースを備えた移動型(人型)ロボットです。徘徊抑制装置12には、徘徊者情報(徘徊者の現在位置情報、移動した経路情報、徘徊者の識別情報など)に基づいて、徘徊を抑制するための発話や応答発話を行います。短期記憶障害を利用して、徘徊者が徘徊を始めるに至った行動を忘却させるための発話や映像、音声を再生します。
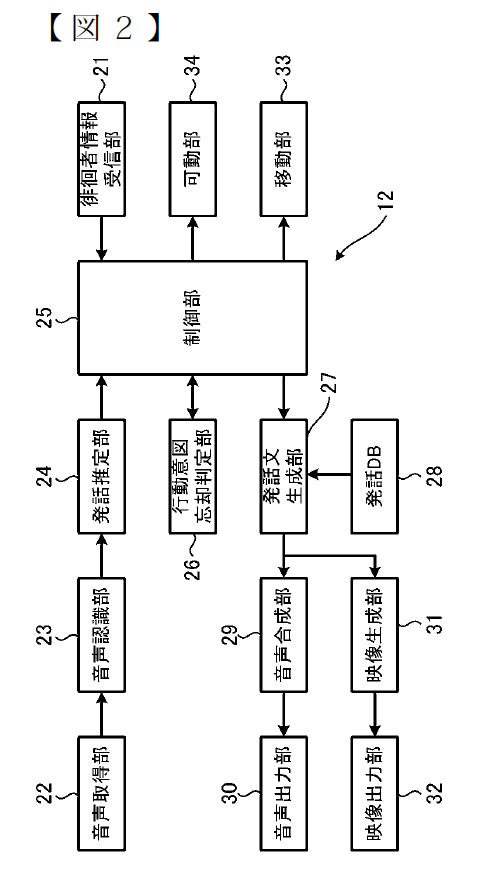
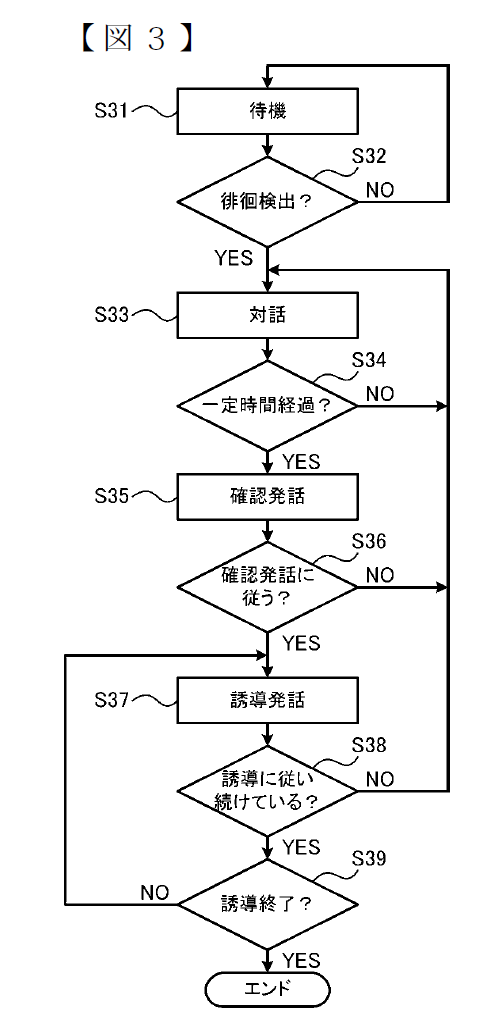
図2は徘徊抑制装置12の構成例です。発話DB28には、徘徊者として検出されうる複数の人物の各々に対して適切な発話内容(例えば、呼びかけ用、雑談用、確認用、誘導用、誘導確認等)がデータベース形式であらかじめ記憶されており、発話文生成部27は、特定された徘徊者に適した呼びかけ用の発話を生成し、音声合成部29へ出力します。発話内容の推定や、推定した発話内容に応じた発話文の生成は、対話内容を定義したルール情報を参照したり、再帰的ニューラルネットワークにより対話モデルを生成したりすることで実現することが出来ます。図3のフローチャートに示すように、一方的に音声通知を行うのではなく、徘徊者に適した発話内容を投げかけ、確認用発話を行うことで、徘徊者の尊厳を傷つけることなく安全に徘徊を防ぐことが可能になります。
このように、「人間の認知機能を利用してロボットが自然な対話を投げかける」という着眼点は、その人の性質に合せた自発的行動を促すことが可能になります。徘徊の抑制だけでなく、私たちの身近な生活の中にも適用できるのではないでしょうか。